
ເຄື່ອງໃຫ້ອາຫານແບດມິນຕັນ Siboasi S4025A ທີ່ນິຍົມທີ່ສຸດ - ຮຸ່ນຍອດນິຍົມ:
| ໝາຍເລກຮຸ່ນ: | ເຄື່ອງຝຶກຊ້ອມແບດມິນຕັນ Siboasi S4025A ລຸ້ນສູງສຸດ (ມີແບັດເຕີຣີ) – ຮຸ່ນສູງສຸດ | ອຸປະກອນເສີມ: | ຊຸດແບັດເຕີຣີ / ຣີໂໝດຄວບຄຸມ / ສາຍໄຟ |
| ຂະໜາດຜະລິດຕະພັນ: | 122ຊມ * 103ຊມ * 240-305ຊມ (ສູງສຸດ: 305ຊມ) | ນ້ຳໜັກເຄື່ອງ: | ມັນມີນ້ຳໜັກສຸດທິ 31 ກິໂລກຣາມ |
| ເໝາະສົມສຳລັບ: | ລົດຮັບສົ່ງທຸກຊະນິດ (ທັງແບບຂົນນົກ / ແບບພາດສະຕິກກໍ່ໃຊ້ໄດ້) | ພະລັງງານ (ໄຟຟ້າ): | ບັນດາປະເທດທີ່ແຕກຕ່າງກັນ: ມີພະລັງງານ AC 110V-240V |
| ຄວາມຈຸຂອງລູກບານ: | ລົດຮັບສົ່ງ 180-200 ຄັນ | ປະເພດ: | ການຖ່າຍຮູບອັດຕະໂນມັດ |
| ພະລັງງານເຄື່ອງຈັກ: | 360 ວັດ | ການວັດແທກການຫຸ້ມຫໍ່: | 55*50*45ຊມ /29*22*145ຊມ /65*31*32ຊມ (ຫຼັງຈາກບັນຈຸກ່ອງ) |
| ການຮັບປະກັນ: | ຮັບປະກັນສອງປີສຳລັບລູກຄ້າ | ນ້ຳໜັກລວມຂອງການຫຸ້ມຫໍ່ | ບັນຈຸ 54 ກິໂລກຣາມ (3 ກ່ອງ) |
ລາຍຊື່ຊິ້ນສ່ວນ (ມາດຕະຖານ) ສຳລັບລູກຄ້າ:
- 1. ຣີໂມດຄວບຄຸມ 1 ໜ່ວຍ
- 2. ແບັດເຕີຣີໜຶ່ງຄູ່ສຳລັບຄວບຄຸມໄລຍະໄກ
- 3. ແບັດເຕີຣີລິທຽມ 1 ໜ່ວຍ
- 7. ເຂັມສີ່ຫລ່ຽມຂອງຕົວຍຶດລົດຮັບສົ່ງ 1 ຊິ້ນ
- 5.ສາຍໄຟ AC ແລະ DC 1 ໜ່ວຍ
- 8. ບ່ອນວາງລົດຮັບສົ່ງ 1 ຊິ້ນ
- 6. ເຄື່ອງສາກແບັດເຕີຣີ 12VDC 1 ໜ່ວຍ
- 9. ປະແຈ 1 ອັນ
- 10. ປະແຈ Allen 2 ໜ່ວຍ
- 11. ຂາຕັ້ງກ້ອງ 1 ໜ່ວຍ
- 12. ຄູ່ມື 1 ຊິ້ນ
- 13. ບັດຮັບປະກັນ 1 ໜ່ວຍ
ການແນະນຳການຄວບຄຸມໄລຍະໄກ:
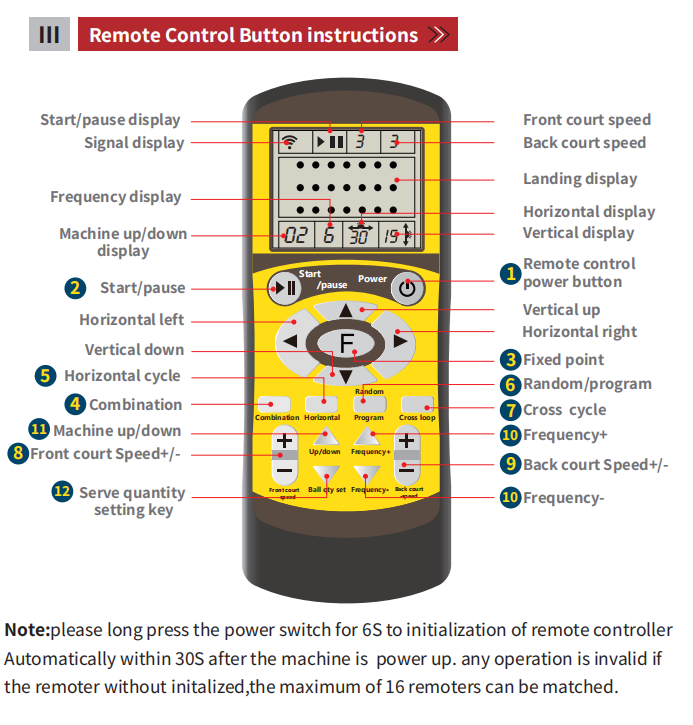
- 1. ປຸ່ມເປີດ/ປິດເຄື່ອງ: ກົດປຸ່ມສະວິດຄ້າງໄວ້ 3 ວິນາທີເພື່ອເລີ່ມຕົ້ນ, 3 ວິນາທີເພື່ອປິດ.
- 2. ປຸ່ມເລີ່ມຕົ້ນ/ຢຸດຊົ່ວຄາວ: ກົດຄັ້ງດຽວເພື່ອຢຸດຊົ່ວຄາວ, ກົດອີກຄັ້ງເພື່ອເຮັດວຽກຊ້ຳ.
- 3. ປຸ່ມ F ສຳລັບໂໝດຄົງທີ່:(1) ກົດປຸ່ມ "F" ເພື່ອເຂົ້າສູ່ໂໝດຈຸດຄົງທີ່,
- ຈຸດເລີ່ມຕົ້ນ 1 ຈຸດ;(2)ກົດປຸ່ມ "F" ເທິງຣີໂໝດຄວບຄຸມຄ້າງໄວ້ 3 ວິນາທີ
- ວິນາທີເພື່ອບັນທຶກພາລາມິເຕີຈຸດຄົງທີ່ທີ່ຕັ້ງໂປຣແກຣມໄວ້;(3)ກົດປຸ່ມ "F" ຄ້າງໄວ້
- ກົດປຸ່ມຂອງຣີໂໝດຄວບຄຸມເປັນເວລາ 8 ວິນາທີ, ແລະພາລາມິເຕີເລີ່ມຕົ້ນຂອງ
- ການຄວບຄຸມໄລຍະໄກຈະຖືກກູ້ຄືນໄປສູ່ການຕັ້ງຄ່າຈາກໂຮງງານ.
- 4. ປຸ່ມໂໝດປະສົມປະສານ :(1) ກົດປຸ່ມ “ໂໝດປະສົມປະສານ” ເພື່ອ
- ເຂົ້າສູ່ໂໝດປະສົມປະສານ. ອຸປະກອນໃຫ້ບໍລິການຕາມຈຸດ
- ຕຳແໜ່ງທີ່ສະແດງຢູ່ໃນຣີໂໝດຄວບຄຸມ. ໃນໂໝດນີ້, ຄວາມຖີ່, ສະໜາມດ້ານໜ້າ
- ຄວາມໄວ, ຄວາມໄວຂອງສະໜາມຫຼັງ ແລະ ການຍົກສາມາດປັບໄດ້; (2) ກົດລູກບານສີ່ຫຼ່ຽມໜ່ວຍທຳອິດ;
- ກົດລູກບານສີ່ຫຼ່ຽມມົນຂະໜາດກາງຕື້ນອັນທີສອງ; ກົດລູກບານຂະໜາດກາງເລິກອັນທີສາມ
- ລູກບານສີ່ຫຼ່ຽມ; ກົດຮອບວຽນສອງຈຸດຕັ້ງສີ່ຮອບ.
- 5. ປຸ່ມຮອບວຽນອອກຕາມແນວນອນ: ກົດປຸ່ມຮອບວຽນອອກຕາມແນວນອນຂອງຣີໂມດສັ້ນໆ
- ຄວບຄຸມ, ແລະກົດຮອບວຽນແບບສຸ່ມອອກຕາມແນວນອນເປັນຄັ້ງທຳອິດ; ສຳລັບ
- ຄັ້ງທີສອງ, ກົດຮອບວຽນລູກບານສອງຈຸດກວ້າງ; ກົດສອງຈຸດກາງ
- ຮອບວຽນລູກບານເປັນຄັ້ງທີສາມ; ກົດຮອບວຽນລູກບານສອງຈຸດແຄບໆເປັນຄັ້ງທີສີ່
- ເວລາ; ກົດຮອບວຽນລູກສາມຄະແນນເປັນຄັ້ງທີຫ້າ; ກົດລູກສະໜາມດ້ານໜ້າຕາມແນວນອນແບບສຸ່ມເປັນຄັ້ງທີຫົກ; ກົດລູກສະໜາມດ້ານຫຼັງຕາມແນວນອນ
- ວົງຈອນແບບສຸ່ມເປັນຄັ້ງທີເຈັດ.
- 6. ປຸ່ມສຸ່ມ / ໂປຣແກຣມ: (1) ກົດສັ້ນໆ “ສຸ່ມ / ໂປຣແກຣມ”
- ໃນຣີໂມດຄວບຄຸມເພື່ອເຂົ້າສູ່ການຮັບໃຊ້ແບບສຸ່ມຂອງສະໜາມທັງໝົດ. ໃນນີ້
- ໂໝດການຕີ, ຄວາມໄວ ແລະ ຄວາມຖີ່ຂອງການຕີສາມາດປັບໄດ້, ແຕ່ບໍ່ສາມາດປັບຈຳນວນລູກໄດ້.(2) ກົດສັ້ນໆ “random / program” ໃນຣີໂໝດ
- ຄວບຄຸມສຳລັບຄັ້ງທີສອງ, ທີສາມ ແລະ ທີສີ່ ເພື່ອສະຫຼັບກຸ່ມການຕັ້ງຄ່າໂປຣແກຣມເລີ່ມຕົ້ນສາມກຸ່ມ. ຄວາມໄວ, ຄວາມຖີ່ ແລະ ຈຳນວນລູກບານສາມາດປັບໄດ້.
- (3) ກົດຄ້າງໄວ້ "ໂໝດການຂຽນໂປຣແກຣມທີ່ຜູ້ໃຊ້ກຳນົດ. ທ່ານສາມາດຕັ້ງຄ່າຈຸດລົງຈອດ 21 ຈຸດໃນພາກສະໜາມ. ແບບສຸ່ມ / ໂປຣແກຣມ" ໃນຣີໂມດຄວບຄຸມເພື່ອເຂົ້າສູ່
- ກົດປຸ່ມຂຶ້ນ, ລົງ, ຊ້າຍ ແລະ ຂວາເພື່ອປັບຕຳແໜ່ງຈຸດລົງຈອດ, ກົດປຸ່ມ "F" ເພື່ອຢືນຢັນ, ກົດຍົກເລີກອີກຄັ້ງ, ກົດຄ້າງໄວ້ເພື່ອຍົກເລີກທັງໝົດ
- ຈຸດລົງຈອດການຂຽນໂປຣແກຣມ. ກົດປຸ່ມ “ສຸ່ມ/ໂປຣແກຣມ” ສັ້ນໆເພື່ອບັນທຶກ
- ແລະອອກຈາກໂໝດການຂຽນໂປຣແກຣມ.
- 7. ປຸ່ມວົງຈອນຂ້າມ: ກົດ “ວົງຈອນຂ້າມ” ໃນຣີໂໝດຄວບຄຸມ, ແລະ
- ລູກບານເລິກກາງຊ້າຍເປັນຄັ້ງທຳອິດ; ກົດເລິກກາງ ກົດລູກບານຕື້ນຊ້າຍເປັນຄັ້ງທີສອງ; ກົດເລິກກາງຂວາ
- ລູກບານຕື້ນເປັນຄັ້ງທີສາມ; ກົດລູກບານເລິກກາງຕື້ນຂວາສຳລັບ
- ຄັ້ງທີສີ່; ກົດລູກບານຊ້າຍເລິກຂວາຕື້ນເປັນຄັ້ງທີຫ້າ; ກົດ
- ລູກບານຊ້າຍຕື້ນ ຂວາເລິກ ເປັນຄັ້ງທີຫົກ.
- 8. ປຸ່ມຄວາມໄວ +/- ຂອງສະໜາມດ້ານໜ້າ: ເມື່ອການຍົກແມ່ນ 1, ເກຍ 1-5
- ສາມາດປັບໄດ້; ເມື່ອການຍົກແມ່ນ 2, ສາມາດປັບລະດັບໄດ້ 1-6.
- 9. ປຸ່ມຄວາມໄວ +/- ຂອງສະໜາມຫຼັງ: ສາມາດປັບໄດ້ 1-5 ລະດັບ.
- 10.ປຸ່ມຄວາມຖີ່ +/-:ສາມາດປັບລະດັບໄດ້ 1-9 ລະດັບ.
- 11. ປຸ່ມຂຶ້ນ/ລົງເຄື່ອງ: (ໜ້າຈໍ 1 ຢູ່ລຸ່ມ ແລະ ໜ້າຈໍ 2 ຢູ່ເທິງ) ປັບຄວາມສູງຂອງຫົວ.
- 12.ປຸ່ມຈຳນວນລູກບານ: (ນັບລູກບານໄດ້ 1-10 ບໍ່ຈຳເປັນ) ປັບຈຳນວນການຮັບໃຊ້.
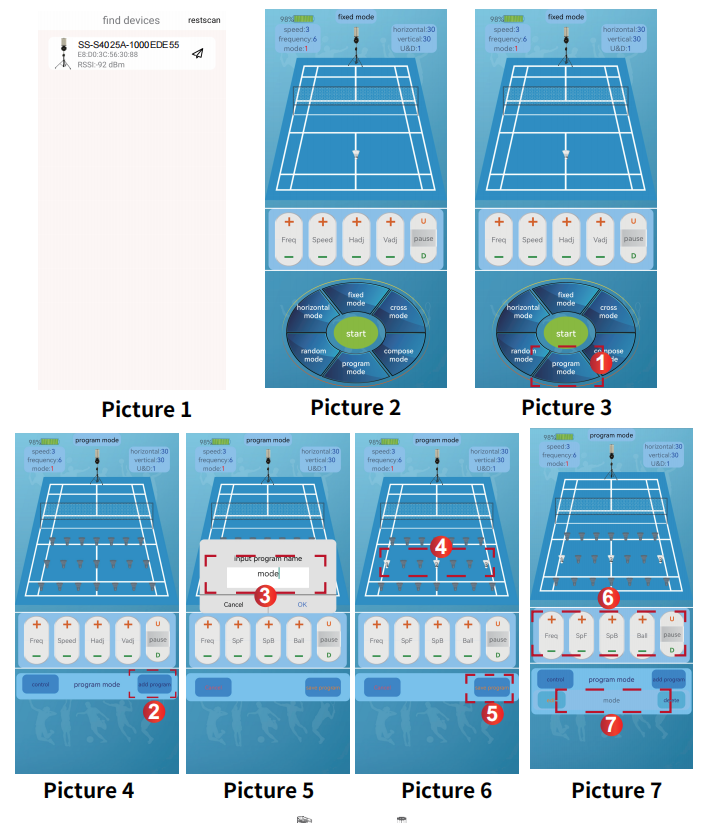
ການແນະນຳແອັບ:
- 1. ດາວໂຫຼດ ແລະ ຕິດຕັ້ງແອັບ “SS-Link” (ໝາຍເຫດ: ສະແກນລະຫັດ QR ໃນຄູ່ມືເພື່ອດາວໂຫຼດ ແລະ ຕິດຕັ້ງ)
- 2. ເປີດບູທູດ.
- 3. ເປີດ "SS-Link", ມັນຈະສະແກນອຸປະກອນທີ່ມີຢູ່ໃນປະຈຸບັນໂດຍອັດຕະໂນມັດ. (ຮູບທີ 1)
- 4. ຄລິກ ”SS-S4025A…” ເພື່ອເຊື່ອມຕໍ່ກັບເຄື່ອງຈັກ, ມັນຈະເຂົ້າສູ່ໜ້າການເຮັດວຽກຂອງແອັບ. (ຮູບທີ 2)
ຂັ້ນຕອນການເຮັດວຽກຂອງໂໝດການຂຽນໂປຣແກຣມ
1. ຊີ້ຈຸດ "ເພີ່ມໂປຣແກຣມ", ໃສ່ຊື່ໂປຣແກຣມທີ່ກຳນົດເອງ, ແລະຈາກນັ້ນຄລິກ "" ໃນໜ້າຈໍເພື່ອເລືອກຈຸດຢອດລູກບານ.
ຈາກນັ້ນຊີ້ “ບັນທຶກ” (ຮູບທີ 3, 4, 5, 6)
2. ຄລິກທີ່ "ໂໝດ" ຂອງໂປຣແກຣມທີ່ຫາກໍ່ແກ້ໄຂ ແລະ ບັນທຶກໄວ້, ແລະ ຈາກນັ້ນກຳນົດຈຳນວນບານ. (ຮູບທີ 7)
ຄວາມໄວຂອງສະໜາມດ້ານໜ້າ, ຄວາມໄວຂອງສະໜາມດ້ານຫຼັງ, ຄວາມຖີ່, ການຂຶ້ນ ແລະ ລົງ ແລະ
3. ຄລິກ “control” ເພື່ອກັບຄືນໄປຫາອິນເຕີເຟດການໃຊ້ງານຫຼັກ.
ການທົບທວນຄືນຈາກລູກຄ້າ SIBOASI:

ຕິດຕໍ່ໂຮງງານ Siboasi ໂດຍກົງ:
- sukie@siboasi.com.cn
- Whatsapp/Wechat: +86 136 6298 7261
ເວລາໂພສ: ສິງຫາ-01-2025